De magneet aandrijvingen van Roco zijn de standaard verkrijgbare types .
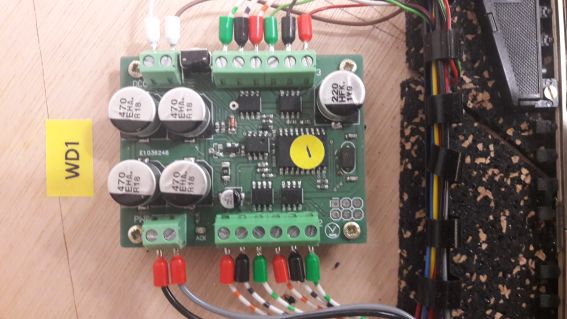
Voor het digitaal aansturen van deze magneet aandrijving is gebruik gemaakt van de WD1 wisseldecoder van Etecmo.
Dit is een eenvoudige decoder die geschikt is voor 4 wisselaandrijvingen en kan per uitgang een maximale stroom leveren van 2,5 Ampère.
Dat is ruim voldoende om de Roco wisselaandrijving zonder problemen aan te sturen.
Wat betreft de programmering hoeft eigenlijk alleen maar het adres ingesteld te worden.
Om het adres in te stellen wordt de decoder met de DCC-aansluiting aangesloten op de programmeer uitgang van de centrale.
De PWR-aansluiting wordt aangesloten op een trafo met 14V uitgangsspanning (wissel of gelijkstroom is niet belangrijk).
Vervolgens worden de trafo en centrale ingeschakeld.
De centrale wordt in de programmeer mode gezet en geven we in dat CV1 moet worden geprogrammeerd.
Afhankelijk van het adres voor de decoder voeren we hier de waarde in.
Dit is voor de wissels 1 t/m 4 de waarde 1, voor 5 t/m 8 de waarde 2 enz.
Het decoder adres is dus iets anders dan een wisselnummer.
Om snel achter het decoderadres te kunnen komen, kun je een omrekentool gebruiken om dit te bepalen.
Vul het adres in en je ziet direct voor welke wissels dit is en welke CV's dan ingevuld moeten worden.
Een dergelijke tool vindt je hier.
Verder hoeft er eigenlijk in de decoder niets veranderd te worden.
De schakeltijden staan standaard op 0,25 seconden en is ruim voldoende om de Roco magneetaandrijvingen lang genoeg te bekrachtigen om goed om te gaan.
Eigenlijk nu klaar voor gebruik.
Mocht je nog iets willen wijzigen dan staat keurig in de handleiding vermeld.
Het aansluiten van de magneet aandrijving op de decoder is zeer eenvoudig.
Ik heb de standaard kleuren van de Roco magneetaandrijving eigenlijk doorgevoerd in de aansluitingen.
De groene en rode aansluiting staan respectievelijk voor "recht" en "afbuig stand van de wissel.
Dit komt vanuit het Duits: Grün = Gerade, Rot = Rund.
Voor het verlengen van de rode draad is er een wit-rode en voor de groene een wit-groene draad gebruikt.
De zwarte (gezamenlijke draad voor de magneetspoelen) is verleng met wit-zwarte draad.
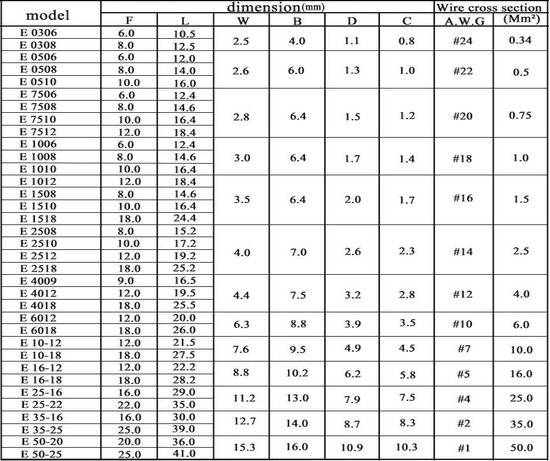
Op het draadeinde dat wordt aangesloten op de verbindingklem van de wisseldecoder is een adereindhuls gebruikt.
Ik heb hier de E0508 voor gebruikt en is geschikt voor AWG22 / Ø0,5mm² draden.
Vor dunnere draad kun je eventueel ook de E306 of de E308 gebruiken.
Voor overige maten kun je hier de tabel vinden welke bruikbaar zijn.
Het gebruik van adereindhulzen wordt gedaan omdat de schroefklem geen klem inrichting heeft voor losse aders.
Om de verbinding betrouwbaar te maken moet de verbinding een massieve draad zijn.
Aangezien de draad bestaat uit meerdere aders, moet je adereindhulzen gebruiken of de draad eerst vertinnen.
Omdat tin relatief zacht is en een adereindhuls relatief hard, gaat de voorkeur uit naar de adereindhuls.
Gesoldeerde draadeinden kunnen bovendien later makkelijker loslaten vanwege de zachtheid van het soldeer.
Deze adereindhulzen zijn in verschillende diameters, lengtes en kleuren te koop.
Voor deze draden heb ik de 0508 gebruikt en zijn ook makkelijkverkrijgbaar.
Ook hier heb ik gemeenschappelijke kleuren van de draad gebruikt, rood voor de wit rode, groen voor de wit-groene en zwart voor de wit-zwarte draad.
Er zit in de draden vanuit de wisseldecoder naar de wisselspoel aansluiting ook maar hooguit 1 verbindingslas.
Deze zit alleen in de overgang van de draad uit de wisselspoel naar de draad voor verlenging.
De verbindingen worden altijd gesoldeerd en afgeïsoleerd d.m.v. een stukje krimpkous.
DSDR, DCC Servo aandrijving.
Voor alle wissels die in het zicht liggen, worden servo aandrijvingen gebruikt.
Het gebruik van servo's heeft het voordeel dat deze onder de wissel geplaatst kunnen worden, dus uit het zicht is.
Daarnaast gaan de wisseltongen, net als in werkelijkheid, langzaam om en maakt de aandrijving weinig tot geen lawaai.
De slag en tempo van de de bewegende wisseltongen zijn met een servo ook eenvoudig in te stellen.
Het gebruik van servo's heeft wel het nadeel dat een wissel niet open gereden kan worden.
Dit betekend in de praktijk dat een wissel altijd gezet moet worden voordat de trein over de wissel rijdt.
In het geautomatiseerde treinverkeer zal dit over het algemeen geen probleem zijn, omdat dan altijd complete wisselstraten worden gezet om een bepaalde route te kunnen volgen.
Bij handmatig rijden moet je wel extra opletten dat alle wissels in de rijweg goed staan om ontsporingen te voorkomen.
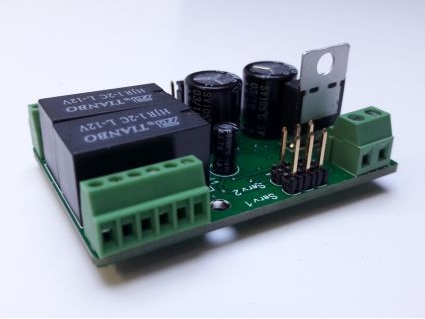
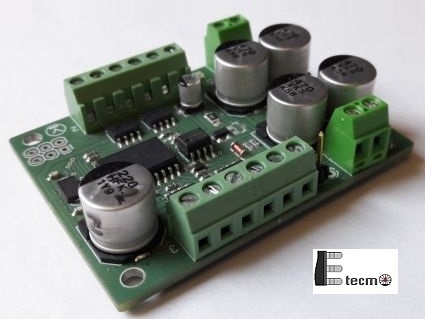
Voor het digitaal aansturen van deze servo aandrijving is gebruik gemaakt van de DSDR servodecoder van Etecmo.
Deze is geschikt voor DCC en kan 2 servo motoren aansturen.
Voor elke servo motor is er een relais aanwezig, waarmee het hartstuk van de wissel gepolariseerd kan worden.
De relais op deze decoder schakelen om, zodra de servo motor de middenstand voorbij gaat.
De Peko wissels zijn van het type Electrofrog, waarbij het hartstuk, de aanloop- en de uitlooprail perfect gepolariseerd kunnen worden.
Bij het plaatsen van de aandrijving wordt de servo in de middenstand gezet.
De wisseltongen moeten nu geheel vrij staan en aan geen enkel rail aanliggen.
Aansluiten
De servodecoder is voorzien van een DCC en een PWR aansluiting, respectievelijk voor de digitale- en voedingsspanning.
Deze twee aansluitingen kun je in principe met elkaar verbinden om de decoder te laten werken, maar is niet slim.
Bij het eventuele wegvallen van de DCC spanning, vallen ook de relais af indien ze bekrachtigd zijn.
Hierdoor kan het hartstuk van de wissel van een verkeerde spanning worden voorzien, indien het DCC weer terug komt.
Indien er niets op het hartstuk van zo'n wissel staat is dat geen probleem, maar indien daar toevallig een loc op staat, ontstaat er direct weer een kortsluiting indien het DCC signaal weer terug komt.
Door dit te scheiden, blijven de relais bekrachtigd indien het DCC signaal weg valt en ontstaat dit probleem niet.
De draden voor het polariseren van de hartstukken, worden aangesloten middels een schroefklem op de decoder.
Het aansluiten van de servomotoren gaat via een standaard 3 polige stekker aansluiting.
Wel is geprobeerd om de decoder zo dicht mogelijk bij de wissels te plaatsen.
Dit voorkomt dat er lange kabels naar de servo motoren moeten worden aangelegd, wat de nodige verstoringen kan geven.
Programmeren
Het adres programmeren van deze decoder gaat verassend eenvoudig,
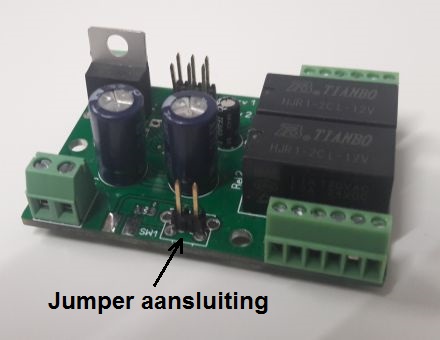
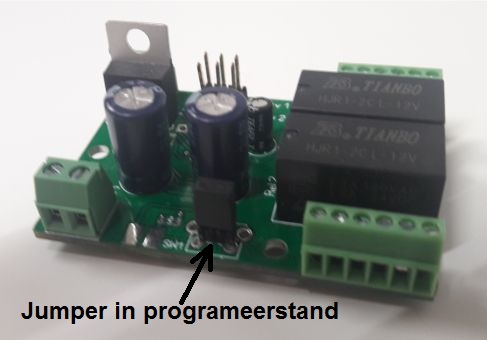
Op de decoder zijn twee pinnen aanwezig om een jumper op te plaatsen.
Als je hier een jumper op plaatst, hoef je alleen maar het wisselnummer wat je wilt programmeren in de decoder, een opdracht te geven (commando recht of afbuigen).
Na deze opdracht kan de servo even bewegen.
Dit hangt af van de huidige stand en de opdracht die je geeft.
Door nu een tegengestelde opdracht te geven, zal de servo zeker een keer een slag maken.
Je kunt daarna de jumper weer verwijderen en de decoder is met het gekozen wissel adres geprogrammeerd.
Je moet hierbij wel bedenken, dat de adressen van beide servo's die op deze decoder zijn aangesloten, altijd opvolgend zijn.
Hierbij is het oneven adres altijd op de "Servo1" aansluiting en het opvolgende even adres op "Servo2", dus 19 en 20 bijvoorbeeld.
Wat betreft de uitslag en snelheid van de servo staat deze vanuit fabriek voor mij al goed en hoeft in mijn geval niet gewijzigd te worden.
Als je dit wil wijzigen, moet je de DCC ingang apart verbinden met de programmeeruitgang van de centrale.
Met CV instellingen kun je nu allerlei zaken aanpassen, zoals snelheid, uitslag etc.
Wat er te wijzigen is staat keurig in de handleiding vermeld.




{kind=link}